To prove the viability of deep learning in highly dynamic, unpredictable environments, MarshallAI partnered with the City of Vantaa, Finland. The objective was to replace traditional, blind traffic sensors with highly accurate machine vision capable of comprehensive object tracking and automated traffic management.
The pilot aimed to confirm that AI-driven visual sensing could operate with extreme reliability, seamlessly integrate with existing hardware controllers, and deliver efficiency gains without requiring prohibitive infrastructure investments.
The Engineering Objectives
To demonstrate absolute operational control, the project focused on two primary targets:
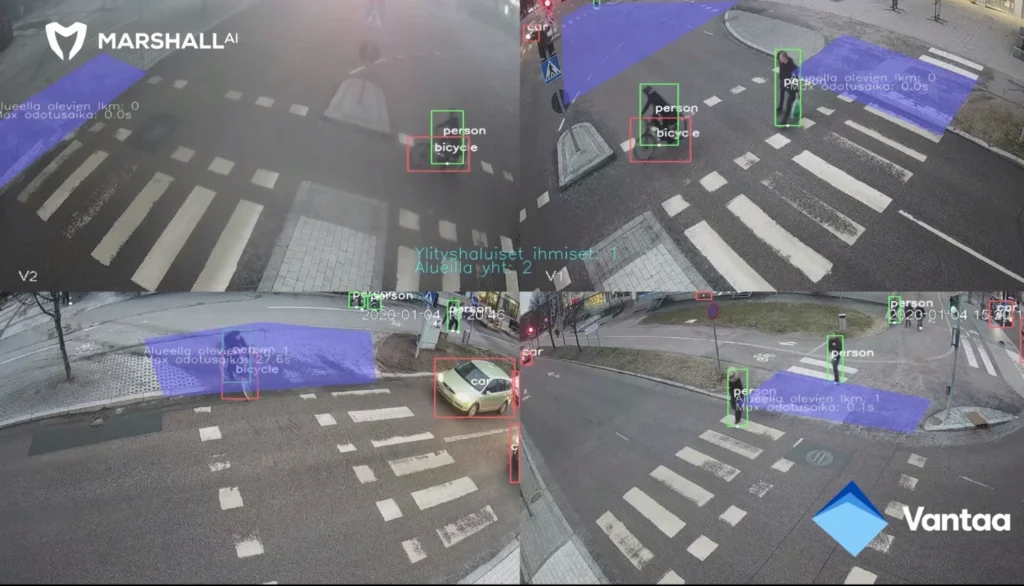
- Comprehensive Flow Analysis: Accurately counting and categorizing highly variable objects (pedestrians, bicycles, cars, vans, buses, and articulated trucks), mapping their routes, and calculating exact wait times.
- Automated Interoperability: Building direct, real-time interoperability with the existing traffic management system to optimize logic and automate infrastructure responses without human intervention.
The Solution: Non-Intrusive, Secure Vision
The deployment spanned two separate intersections equipped with nine standard IP cameras mounted on existing light poles. Data transmission was handled securely via mobile networks.
To minimize physical hardware and complex installations on-site, the heavy data processing was deployed as a secure cloud service hosted in MarshallAI’s Finnish data center. Privacy and security were paramount: no sensitive data or video footage was stored.
Open live stream of the pilot was offered to the public and subjects were automatically blurred using MarshallAI’s tools to protect identities.

Performance in Harsh Environments
One of the most significant outcomes of the Vantaa pilot was proving the resilience of the MarshallAI platform in harsh physical conditions. Machine vision relies on clarity, but real-world environments are rarely clean.
The system successfully navigated extreme Finnish weather conditions, including snow, heavy rain, and dynamic backlighting. By utilizing motorized cameras and heated camera lenses to clear water and snow, and strategically positioning camera angles to mitigate glare, the platform proved that environmental challenges can be entirely engineered out. If the AI can reliably track a bicycle in a blizzard, it is more than capable of inspecting parts in challenging industrial conditions.
Exceptional Reliability & Results
The MarshallAI object detection engine delivered extreme reliability, proving its readiness for mission-critical automation. Throughout the project, the average object detection rate exceeded 98% across all distinct classes.
- Pedestrian Detection: 99.8% Reliability
- Vehicle Detection: 98.9% Reliability
- Bicycle Detection: 98.2% Reliability
By applying automatic optimization to the intersection’s management system based on this real-time data, the system eliminated 30,000 unnecessary stops annually. This resulted in saving over a month’s worth of cumulative waiting time per year, massively reducing emissions and proving that AI-driven actuation yields immediate, measurable ROI.
